











QR-Code

Über uns
Produkte
Kontaktiere uns

Telefon

Email

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China

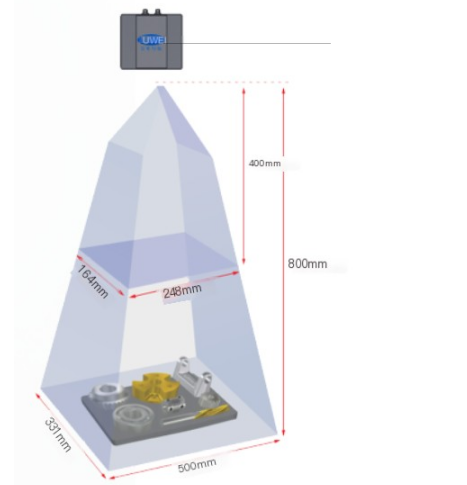
In der automatisierten Montagelinie für die Verarbeitung von Aluminiumlegierungblechen wirkt sich die Platzierungsgenauigkeit des Feeders direkt auf die endgültige Qualität und Produktionseffizienz des Produkts aus. Wie man sicherstellt, dass der Feeder das Werkstück genau in die angegebene Position auf einer geschäftigen Produktionslinie stellt, ist eine große Herausforderung für uns geworden. Heute werden wir unsere 3D -visuelle Leitlinie vorstellen, die sicherstellt, dass die Platzierungsgenauigkeit des Feeders ± 2 mm mit einer Sichtweite von 1500 mm und einer Kameraauflösung von 20 Millionen erreicht.

1 、 hohe Präzision 3D -Visionssystem
Erstens verwendet unsere Lösung ein hochpräzisetztes 3D-Visionssystem. Dieses System verwendet Hochgeschwindigkeitskameras und erweiterte Bildverarbeitungsalgorithmen, um Informationen in Echtzeit-Werkstücken zur Produktionslinie zu erfassen und die 3D-Rekonstruktion durchzuführen. Innerhalb eines Sichtbereichs von 1500 mm kann unser System jedes Detail des Werkstücks klar identifizieren und präzise Datenunterstützung für die nachfolgende Platzierung bieten.
2 、 Intelligente Algorithmusoptimierung
Es reicht jedoch nicht aus, sich ausschließlich auf hochpräzise visuelle Systeme zu verlassen. Um sicherzustellen, dass die Platzierungsgenauigkeit des Materials ± 2 mm erreicht, müssen wir auch den Algorithmus optimieren. Unser F & E -Team hat genaue Anpassungen und Optimierungen für verschiedene Aspekte wie visuelle Erkennung, Pfadplanung und Roboterkontrolle durch umfangreiche Experimente und Datenanalysen vorgenommen.
In Bezug auf die visuelle Erkennung haben wir fortgeschrittene Feature -Extraktion und Matching -Algorithmen übernommen, die die Position und Haltung des Werkstücks genau identifizieren können. In Bezug auf die Pfadplanung betrachten wir verschiedene Faktoren wie die Bewegungsbahn des Roboters, die Form und Größe des Werkstücks usw., um sicherzustellen, dass der Roboter entlang des optimalen Pfades platziert werden kann. In Bezug auf die Roboterkontrolle verwenden wir hochpräzise Servomotoren und -controller, um sicherzustellen, dass sich der Roboter entsprechend dem voreingestellten Pfad und der voreingestellten Geschwindigkeit bewegen kann.
3 、 Echtzeit -Feedback und Anpassung
Darüber hinaus kann unser System auch Echtzeit-Feedback und -anpassung bieten. Während des Roboterplatzierung überwacht unser System kontinuierlich die Position und Haltung des Werkstücks in Echtzeit und führt die Überwachungsergebnisse in das Steuerungssystem zurück. Wenn zwischen der tatsächlichen Platzierungsposition und der voreingestellten Position eine Abweichung vorliegt, stimmt das Steuerungssystem den Roboter sofort ein, um sicherzustellen, dass die endgültige Platzierungsgenauigkeit ± 2 mm erreicht.
Durch unsere 3D -Lösung für visuelle Leitfaden haben wir die Genauigkeit der Feeder -Platzierung in mehreren Verarbeitungsunternehmen mit Aluminium -Leichtmetallblech erfolgreich verbessert. In praktischen Anwendungen verbessert unser System nicht nur die Produktionseffizienz, sondern reduziert auch die Defektrate, wodurch greifbare wirtschaftliche Vorteile für das Unternehmen eingebracht werden.
Zusammenfassend hat unsere 3D-Lösung für visuelle Leitlinien die Platzierungsgenauigkeit des Feeders in der Verarbeitung von Aluminium-Legierungsblättern durch hochpräzise visuelle Systeme, intelligente Algorithmusoptimierung sowie Echtzeit-Feedback und -anpassung erfolgreich verbessert. In Zukunft werden wir unsere Lösungen weiterhin optimieren und verbessern, wodurch mehr Unternehmen effizientere und genauere automatisierte Verarbeitungslösungen verleihen.
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China
