











QR-Code

Über uns
Produkte
Kontaktiere uns

Telefon

Email

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China

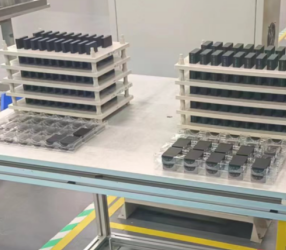
Mit der rasanten Entwicklung intelligenter Fertigungstechnologie wird die Anwendung automatisierter Produktionslinien im Bereich magnetischer Stahlproduktion immer weit verbreitet. Traditionelle manuelle Beladungs- und Entlademethoden haben jedoch viele Probleme, wie z. B. geringe Effizienz, instabile Qualität, Sicherheitsrisiken usw., die nicht mehr in der Lage sind, die Bedürfnisse der modernen Produktion zu erfüllen. Fuwei Intelligence hat eine zusammengesetzte Roboterlösung zum Laden und Entladen von Magnetstahl vorgeschlagen, um die Produktionseffizienz zu verbessern, die Arbeitskosten zu senken und die betriebliche Sicherheit auf intelligente Weise zu gewährleisten.

Branchenschmerzpunkte
Niedrige Produktionseffizienz: Wenn Sie sich auf den manuellen Betrieb verlassen, ist es schwierig, die Effizienz zu verbessern.
Instabile Qualität: Die Genauigkeit und Konsistenz des manuellen Betriebs ist schwer zu garantieren.
Wichtige Sicherheitsrisiken: Unfälle wie Handklemm und Auswirkungen sind während des Betriebs zu erfolgen.
Schlechtes Arbeitsumfeld: stellt eine potenzielle Bedrohung für die Gesundheit der Betreiber dar.
Überblick über Kundenbedürfnisse und Lösungen
Kundennachfrage: Wir hoffen, dass wir mit intelligenten Mitteln automatisch beladen und entladen werden, um die Produktionseffizienz und die Qualitätsstabilität zu verbessern. Zu den spezifischen Anforderungen gehören das Laden und Entladen von zwei Arten von Produkten, mit einer Zykluszeit von etwa 80 Sekunden, um das Laden und Entladen von zwei Produktstapeln zu vervollständigen, sowie die hohen Genauigkeitsanforderungen.
Lösungsübersicht:
Ersetzen von Motoren und Servocontrollern: Verbesserung der Roboterleistung und -stabilität.
Ausgestattet mit Radarnavigation, leichten Streifen und Lautsprechern: Verbesserung der autonomen Navigation, Sichtbarkeit und Interaktivität des Roboters.
Design Customized Gripper: Integrieren Sie Kamera und Sensor, um eine präzise Erkennung und Erfindung von magnetischem Stahl zu erzielen.
Optimieren Sie die Layout- und Ausrüstungskonfiguration der Lade- und Entladenbereiche, um sicherzustellen, dass Roboter ihre Arbeit genau und effizient abschließen können.
Implementierung und Optimierung des Plans
Zusammengesetzte Roboter -Transformation:
Wählen Sie Hochleistungsmotoren und Servo-Controller aus, um die Genauigkeit und Stabilität der Bewegung sicherzustellen.
Ausgestattet mit Radarnavigation, um autonome Positionierung und Pfadplanung zu erreichen.
Installieren Sie LED -Lichtstreifen und Alarmlautsprecher, um die Sichtbarkeit und Interaktivität zu verbessern.
Entwerfen Sie maßgeschneiderte Greifer, die Kameras und Sensoren integrieren, um eine präzise Identifizierung und das Greifen von Magnetstahl zu erreichen.
Optimierung des Ladebereichs:
Konstruktionspositionierungsanleitung Slots zum Führung von Magnetstahl in ausgewiesene Positionen.
Richten Sie Desktop -Positionierungsmarkierungen ein, um die Erkennung und Positionierung von Greifpunkten der Roboter zu erleichtern.
Renovierung der Materialentladefläche:
Stellen Sie das Gerätestellungsmarke ein, um sicherzustellen, dass der Roboter den Magneten genau legt.
Installieren Sie die Türen für elektrische Bedienfeldtüren und elektrische Steuerungsschlitze, um die Betreiber vor Verletzungen zu schützen und automatisierte Geräteauswehlungen zu erreichen.
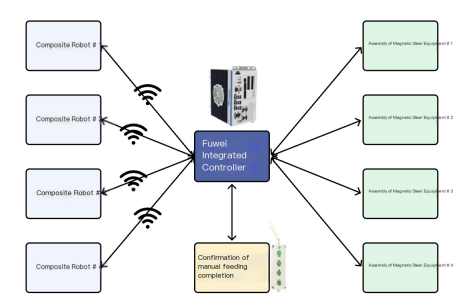
Ausführungslogik und Prozessoptimierung
Die Ausführungslogik des gesamten Plans basiert auf dem Prozessdesign der automatisierten Produktionslinie, um die Kontinuität und Effizienz des Workflows zu gewährleisten. Der gesamte Vorgang wird durch eine Ladeanforderung ausgelöst, und der Roboter führt auf der Grundlage des Status des Ladebereichs Materialabrufvorgänge aus. Während des Picks und Platzierens von Materialien werden eine präzise Erkennung und Kraftkontrolle durch Kameras und Sensoren erreicht, die in den Greifer integriert sind. Sobald der Magnete erfolgreich auf die Ausrüstung gesetzt wurde, bestätigt der Roboter den Abschluss der Belastung und geht mit dem nächsten Zyklus fort.
Durch die Verwendung des fuwei intelligenten Verbundroboter
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China
