











QR-Code

Über uns
Produkte
Kontaktiere uns

Telefon

Email

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China

Mit der zunehmenden Weiterentwicklung der intelligenten Fertigungstechnologie wird das Eindringen automatisierter Produktionslinien in der Branche für magnetische Stahlherstellung immer mehr. Der herkömmliche Handbuch- und Entlastungsmodus, der eine geringe Effizienz, Schwankungen von großer Qualität und potenzielle Sicherheitsrisiken aufweist, hat jedoch nach und nach eine Trennung von modernen hocheffizienten Produktionsanforderungen gezeigt. Die innovative Lösung für die Anwendung von Fuwei intelligenten Verbundrobotern auf das Laden und Entladen von magnetischem Stahl zielt darauf ab, die Transformation der Magnetstahlproduktion in Richtung umfassender Automatisierung und Intelligenz zu fördern, indem die Produktionseffizienz verbessert, die Arbeitskosten gesenkt werden und die betriebliche Sicherheit verbessert werden. Dieser Plan repräsentiert nicht nur die Innovation der Produktionstechnologie, sondern praktiziert auch aktiv die Vision zukünftiger intelligenter Fabriken.
Branchenschmerzpunkte:
1. Eine hohe Abhängigkeit vom manuellen Betrieb führt zu einer geringen Produktionseffizienz und einer instabilen Qualität;
2. Es gibt Sicherheitsrisiken während des Betriebsprozesses, wie Unfälle wie Handklumpen und Auswirkungen;
3. Das schlechte Arbeitsumfeld stellt eine potenzielle Bedrohung für die Gesundheit der Betreiber dar;
4. Manueller Betrieb ist schwierig, den großflächigen Produktionsbedarf und hohen Effizienz-Produktionsanforderungen zu erfüllen.
Überblick über Kundenbedürfnisse und Lösungen
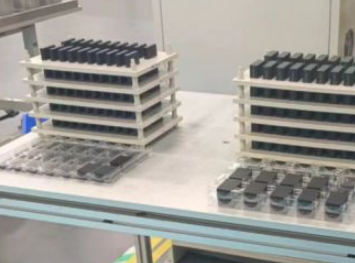
Kundennachfrage: Der Kunde hofft, automatische Belastung und Entladung von Magnetstahl durch den intelligenten Verbundroboter von Fuwei zu erreichen, wodurch die Produktionseffizienz und die Qualitätsstabilität verbessert werden. Zu den spezifischen Anforderungen gehören das Laden und Entladen von zwei Arten von Produkten, mit einer Zykluszeit von etwa 80 Sekunden, um die Beladung von zwei Produktstapeln zu vervollständigen, und die hohe Präzisionsanforderungen zu haben.
Lösungsübersicht
Wir schlagen den folgenden Renovierungsplan vor, um die Bedürfnisse unserer Kunden zu erfüllen:
1. Ersetzen Sie den Motor- und Servo -Controller, um die Leistung und Stabilität des Roboters zu verbessern.
2. mit Radarnavigation, leichten Streifen und Lautsprechern ausgestattet, um die autonome Navigation, Sichtbarkeit und Interaktivität des Roboters zu verbessern;
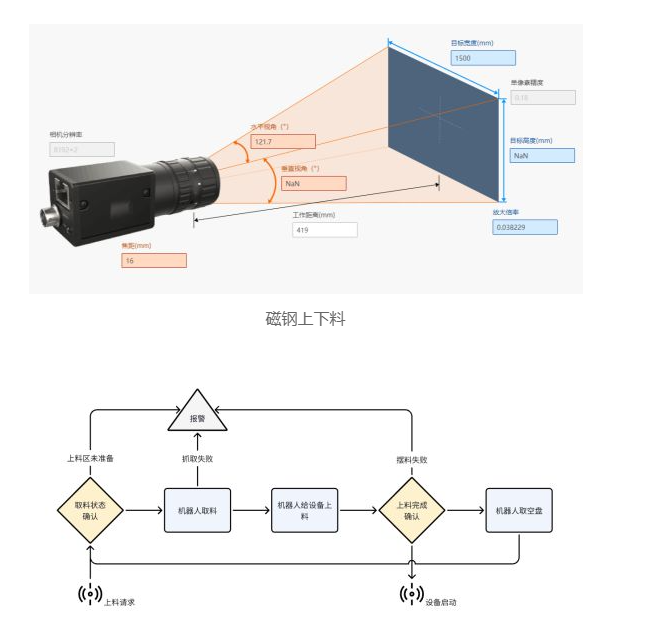
3.. Entwerfen Sie maßgeschneiderte Greifer, die Kameras und Sensoren integrieren, um eine präzise Identifizierung und Erfindung von Magnetstahl zu erreichen.
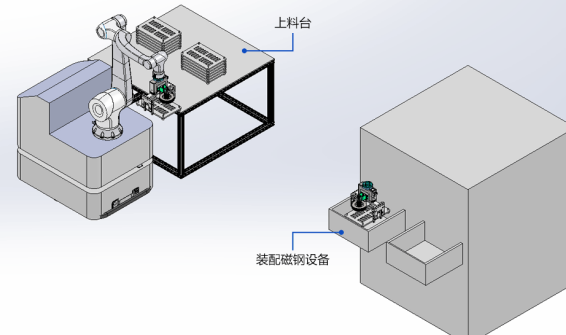
4. Optimieren Sie die Layout- und Gerätekonfiguration der Lade- und Entladebereiche, um sicherzustellen, dass die Roboter ihre Arbeit genau und effizient abschließen können.
4 、 Detaillierte Implementierung des Renovierungsplans
Zusammengesetzte Robotertransformation

Wählen Sie Hochleistungsmotoren und Servo-Controller aus, um die Genauigkeit und Stabilität der Roboterbewegung sicherzustellen.
Ausgestattet mit Radarnavigation, um eine autonome Positionierung und Pfadplanung von Robotern zu erreichen;
Installieren Sie LED -Lichtstreifen und Alarmlautsprecher, um die Sichtbarkeit und Interaktivität des Roboters zu verbessern.
Entwerfen Sie maßgeschneiderte Greifer, die Kameras und Sensoren integrieren, um eine präzise Identifizierung und das Greifen von Magnetstahl zu erreichen.
Optimierung des Belastungsbereichs
Konstruktionspositionierungsanleitung Slots zum Leiten von Magnetstahl in ausgewiesene Positionen;
Richten Sie Desktop -Positionierungsmarkierungen ein, um die Erkennung und Positionierung von Greifpunkten der Roboter zu erleichtern.
Renovierung des Entlastungsbereichs
Stellen Sie das Gerätestellungsmarke ein, um sicherzustellen, dass der Roboter den magnetischen Stahl genau legt.
Installieren Sie die Türen für elektrische Bedienfeldtüren und elektrische Steuerungsschlitze, um die Betreiber vor Verletzungen zu schützen und automatisierte Geräteauswehlungen zu erreichen.
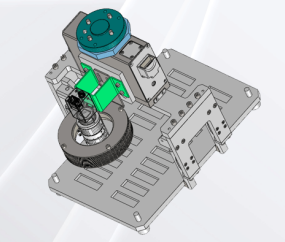
Ausführungslogik und Prozessoptimierung
Die Ausführungslogik der gesamten Lösung basiert auf dem Prozessdesign automatisierter Produktionslinien, um die Kontinuität und Effizienz des Workflows zu gewährleisten. Der gesamte Vorgang wird durch eine Ladeanforderung ausgelöst, und der Roboter führt materielle Abrufvorgänge aus, basierend darauf, ob der Ladebereich fertig ist. Während des Picks und Platzierens von Materialien werden eine präzise Erkennung und Kraftkontrolle durch Kameras und Sensoren erreicht, die in den Greifer integriert sind. Sobald der Magnete erfolgreich auf die Ausrüstung gesetzt wurde, bestätigt der Roboter den Abschluss der Belastung und geht mit dem nächsten Zyklus fort.
Durch die Verwendung des Fuwei intelligenten Verbundroboters für die Belastung und Entladung von Magnetstahl können wir die Probleme herkömmlicher manueller Belastungs- und Entlademethoden effektiv lösen, die Produktionseffizienz verbessern, die Arbeitskosten senken und die betriebliche Sicherheit gewährleisten. Gleichzeitig weist diese Lösung auch eine hohe Skalierbarkeit und Flexibilität auf, die sich an Magnetstahlproduktionsunternehmen verschiedener Skalen und Produktionsanforderungen anpassen kann.
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China
