











QR-Code

Über uns
Produkte
Kontaktiere uns

Telefon

Email

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China

Projektübersicht
Dieses Projekt zielt darauf ab, ein effizientes und stabiles automatisches Ladesystem für Muldenkipper zu entwerfen, um den Ladebedarf der Kunden unter den Produktionsbedingungen in der Region Shanxi zu erfüllen. Das System muss unbemannten Betrieb und Kontrolle von technischen Fahrzeugen erreichen, wodurch nur die Handhabung und die automatischen Ladefunktionen der Punkte A und B die kontinuierlichen Betriebsanforderungen der Produktionslinie erfüllt werden.
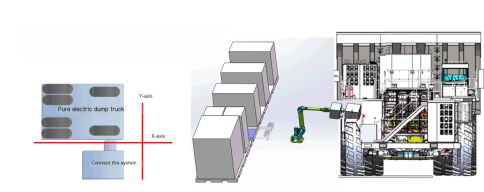
Systemzusammensetzung
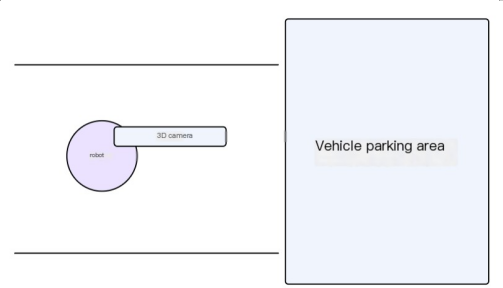
Visuelles Positionierungssystem: Nutzung von Kameras mit hoher Präzision und visuellen Algorithmen, um eine präzise Positionierung des Ladeanschlusses für Muldenwagen zu erreichen. Das visuelle System muss in der Lage sein, Staub und direktem Sonnenlicht zu widerstehen, um einen stabilen Betrieb in verschiedenen Innenumgebungen zu gewährleisten.
Roboter und Waffenschubmechanismen: Industrie -Roboter mit einer Armspanne von 3 m oder mehr werden ausgewählt und mit speziell entwickelten Waffenschubmechanismen ausgestattet. Der Pushing -Mechanismus sollte einen ausreichenden Schub und Genauigkeit haben, um sicherzustellen, dass die Ladewaffe genau und schnell in den Ladeanschluss eingeführt werden kann.
Ladesystem: Ausgestattet mit Hochleistungsladungsausrüstung von 3 Megawatt, um sicherzustellen, dass der Muldenkipper in kurzer Zeit vollständig aufgeladen und die Produktionseffizienz verbessert werden kann.
Steuerungssystem: Durch ein integriertes Steuerungssystem kann eine präzise Steuerung der visuellen Positionierung, der Roboterbewegung und des Ladevorgangs erreicht werden. Das Steuerungssystem sollte über hohe Automatisierungs- und Intelligenzeigenschaften verfügen und in der Lage sein, unbemannte automatische Aufladungen zu erreichen.
Workflow
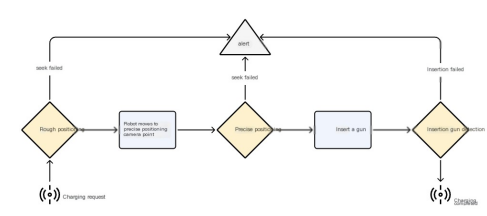
Self -Dumping -LKW -Positionierung: Identifizieren und lokalisieren die Ladeanschlussposition des Muldenkippers über ein visuelles Positionierungssystem.
Roboterbewegung: Das Steuerungssystem führt den Roboter, um sich in der Nähe des Ladeanschlusses des Muldenkippers zu bewegen, basierend auf den Ergebnissen der visuellen Positionierung.
Pushing Gun Insertion: Der Roboter ist mit einem Pushing -Waffenmechanismus ausgestattet, der die Ladungspistole genau und schnell in den Ladebereich des Muldenkippers einfügt.
Ladevorgang: Das Ladesystem beginnt mit dem Laden des Muldenkörpers, bis es den voreingestellten Stromniveau oder die Zeit erreicht.
Roboter -Evakuierung: Nach Abschluss des Gebührenes evakuieren der Roboter den Ladeanschluss und warten auf die Ankunft des nächsten Muldenkipper.
Schlüsseltechnologie
Visuelle Positionierungstechnologie: Durch die Verwendung von Algorithmen wie Deep Learning können die Genauigkeit und Stabilität visueller Positionierungssysteme verbessert werden.
Roboterkontrolltechnologie: Optimieren Sie die Roboterbewegungsbahn und die Geschwindigkeit, um die Ladeeffizienz zu verbessern.
Design des Waffenmechanismus: Stellen Sie sicher, dass der Mechanismus des Waffenschusses ausreichend Schub und Genauigkeit hat, während die strukturelle Kompaktheit und Zuverlässigkeit berücksichtigt wird.
Risikoreaktion
Umweltschutz in Innenräumen: Stellen Sie eine saubere und trockene Umgebung in Innenräumen sicher, verringern Sie die Auswirkungen von Staub und direktes Sonnenlicht auf das visuelle Positionierungssystem.
Hardware -Wartung: Hardware für Hardware wie Roboter und visuelle Positionierungssysteme, um ihren normalen Betrieb zu gewährleisten.
Professionelle Bewertung: Laden Sie Fachleute ein, den Waffenmechanismus, das Ladesystem usw. zu bewerten und zu optimieren, um die Sicherheit und Machbarkeit der Lösung zu gewährleisten.
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China
