











QR-Code

Über uns
Produkte
Kontaktiere uns

Telefon

Email

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China

1 、 Projektübersicht
Dieser Plan zielt darauf ab, ein Plattformsystem für Roboterausbildungspraxis anzupassen, um die Lehrbedürfnisse eines Universitätslabors für maschinelle Vision und Force Control zu erfüllen. Das System wird rund um den kollaborativen Roboter von Aubo-I5, die Hikvision-Industriekamera, die 3D-Kamera und den sechs Achsen-Kraftsensor entwickelt, um Funktionen wie Roboterkontrolle, visuelle Inspektion und Kraftsteuerungsbaugruppe zu erzielen und open-Source-obere Computersoftware für eine spätere funktionale Expansion bereitzustellen.

2 、 Systemhardwarezusammensetzung
Roboter: Die Einführung von Aubo-I5 Collaborative Roboter hat die Eigenschaften von hoher Präzision und hoher Sicherheit und eignet sich für Lehrszenarien.
Kamera: einschließlich Hikvision Industrial Camera und 3D -Kamera, verwendet, um Bildinformationen von Werkstücken zu erhalten, die traditionelle Bildverarbeitung und Deep -Lern -Bilderkennung unterstützt.
Sechsdimensionaler Kraftsensor: Kunwei (KWR75) oder andere Marken werden für die Echtzeitüberwachung von Interaktionsinformationen zwischen dem Roboter-End-Effektor und dem Werkstück ausgewählt.
3 、 Design der oberen Computersoftware
Grundfunktionen:
Roboterkontrolle: Implementieren Sie Funktionen wie Verbindung, Trennung, gemeinsame oder Haltungskontrolle von Robotern.
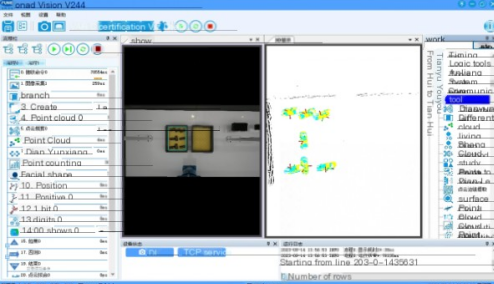
Kamerakontrolle: Implementieren Sie Funktionen wie Kamerasverbindung, Trennung und Bildaufnahme.
Statusanzeige: Echtzeitanzeige des Gelenk- und Pose -Status des Roboters, der Statusparameter des sechs Achsenkraftsensors und der von der Kamera aufgenommenen Bilder.
Exklusive Funktionen:
Wellenlochbaugruppe: Durch den Betrieb des oberen Computers, kombiniert mit der visuellen Inspektion und der Kraftsteuerungstechnologie, wird die automatische Montagefunktion des Schaftlochs erreicht.
Schnittstellendesign: Die obere Computerschnittstelle sollte präzise, klar und einfach zu bedienen sein. Die Schnittstelle sollte grundlegende Funktionsschaltflächen und einen Statusanzeigebereich enthalten sowie den Zugriff auf die Well -Loch -Montagefunktion bieten.
4 、 Funktion Implementierung
Maschinenaufwand:
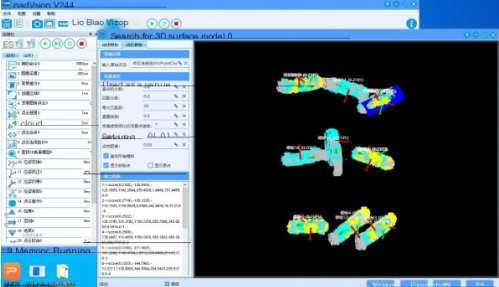
Traditionelle Bilderkennung: Verwenden von Vorlagenanpassungen, Kreisanpassung, Kantenanpassung und anderen Methoden zur Lokalisierung und Erkennung von Werkstücken, die die Erkennung von Barcodes, QR -Codes, Zeichenzahlen sowie die Berechnung der Graustufenfläche und der Plattenmenge unterstützen.
Erkennung von Deep -Learning -Bild: Automatische Erkennung und Lokalisierung von Werkstücken durch tiefe Lernalgorithmen. Obwohl Deep Learning immer noch eine manuelle Annotation von Bildern erfordert, werden wir uns bemühen, die Schulungseffizienz und die Erkennungsgenauigkeit zu verbessern und die Annotations -Arbeitsbelastung allmählich zu verringern.
Stromversorgungsbaugruppe:
Kombinieren Sie Daten aus sechs dimensionalen Kraftsensoren, erreichen die Kraftwechselwirkungsregelung zwischen dem Roboterend -Effektor und dem Werkstück und vollständige präzise Baugruppe des Schaftlochs.
5 、 Projektrisiken und Antwortmaßnahmen
Das Risiko einer Zusammenarbeit mit sechs Achsenkraftsensoren: Aufgrund der mangelnden Zusammenarbeit mit sechs Achsenkraftsensoren kann es bestimmte technische Schwierigkeiten und Unsicherheiten geben. Wir werden ein professionelles technisches Team arrangieren, um das Problem anzugehen und die reibungslose Integration und den stabilen Betrieb der Sensoren zu gewährleisten.
Risiko einer Deep -Learning -Bilderkennung: Die Erkennung von Deep Learning Image erfordert ein gewisses Maß an Erkennungsgenauigkeit und Effizienz und erfüllt gleichzeitig die Anforderungen eines Klick -Trainings. Wir werden weiterhin Deep -Lern -Algorithmen optimieren, um die Erkennungsgenauigkeit und -effizienz zu verbessern und gleichzeitig Möglichkeiten zur Implementierung eines Klick -Trainings zu untersuchen.
6 、 Post -Expansion und Szenenwechsel
Die obere Computersoftware nimmt Open Source -Design an, was die funktionale Expansions- und Szenenwechsel nach Bedarf im späteren Unterricht erleichtert. Beispielsweise kann die Montageszene von Wellenlöchern auf Aufgaben wie das Mischen von feinen Zahnrädern oder die Erkennung und das Greifen anderer Werkstücke umgestellt werden. Durch das Ändern und Debuggen von Open-Source-Programmen ist es einfach, den Roboterbetrieb und die visuellen Erkennungsfunktionen in verschiedenen Szenarien zu erzielen.
Dieser Plan integriert Hardware-Ressourcen wie Roboter, Kameras und sechs Achsenkraftsensoren, kombiniert mit Open-Source-Design der oberen Computer-Computer-Software, um eine feature reichhaltige und leicht erweiterbare Lehrumgebung für die Plattform für Roboterausbildungspraxis zu bieten. Durch den Einsatz praktischer Plattformen können die Schüler ein tieferes Verständnis der Prinzipien und Anwendungen von Maschinenaufnahmen und Kraftsteuerungstechnologie erlangen und ihre praktischen und innovativen Fähigkeiten verbessern.
Nr. 22, Hongyuan Road, Guangzhou, Provinz Guangdong, China
